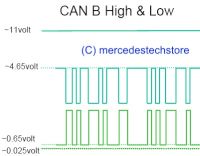
Controller Area Network (als Abkürzung CAN), so heißt das Bussystem, das ab 1983 von Bosch entwickelt wurde und 1991 als CAN-Spezifikation 2.0 veröffentlicht wurde. Sie enthält aber nur die physikalische Ebene, die Codierung des Bit-Transfers und die Übermittlung von Botschaften und die Fehlerbehandlung.
Oft sind mehrere Geräte wie Navigation (Comand 2.0), CD-Wechsler und Telefon im Auto verbaut und werden im Tachodisplay angezeigt und können über Lenkradtasten bedient werden. Oder die Daten der ABS-Sensoren müssen an einen Motor-Zentralrechner übermittelt werden, um bei Schlupf das Drehmoment zu reduzieren. Auch in Kaffeemaschinen und in Aufzügen findet man die CAN-Bus-Technologie ebenso wie in Textilmaschinen.
Die herkömmliche Kupfer-Kabelbaumtechnik ist da bald am Ende, es kommt zu riesigen Kabelbäumen. Elektromagnetische Störungen/Einstrahlungen kommen hinzu. So war die Zeit reif für neuere Netzwerksysteme.
Viel besser sind da Knotensysteme, die über eine einfache Ringleitung alle miteinander und mit dem Zentralrechner verbunden sind. So filtern dann intelligente Sensoren (Knoten) Störungen heraus, digitalisieren die Daten und leiten sie an alle, die diese Daten brauchen. Diese Knotenpunkte liegen wie die Haltestellen einer Buslinie an der Leitung = Bustechnologie.
CANopen:
Da die von Bosch definierten Protokolle nur die grundlegenden Dinge beschreiben, wurden bald ergänzende Protokolle eingeführt, so im europäischen Raum das CANopen und im amerikanischen Bereich das DeviceNet.